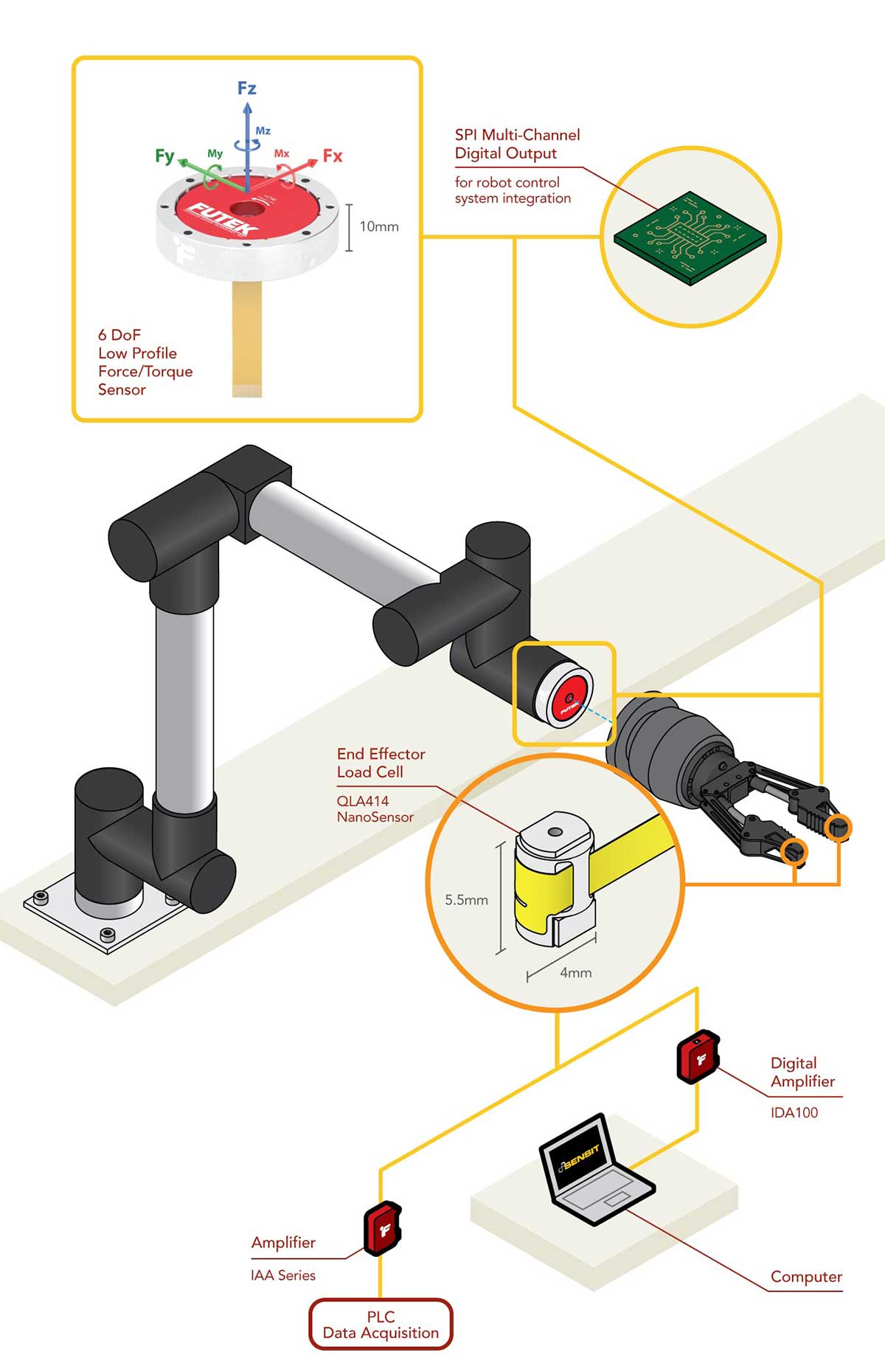
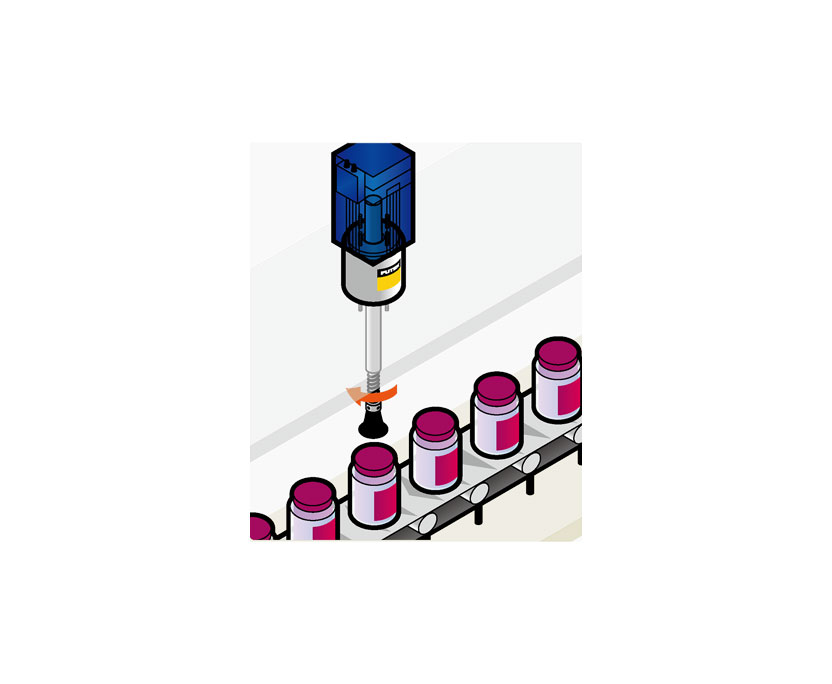
6 軸力傳感器是一種用于確保機器人應用精度的設備。該傳感器專為機器人關節設計,通常安裝在機械臂的手腕上,為所有三個幾何坐標(Fx、Fy、Fz)及其周圍的時刻或扭矩(Mx、My、Mz)提供精確的力測量。力/扭矩傳感器用于產品測試、機器人組裝、研磨、拋光和其他工業應用,在這些應用中,需要保持穩定的位置和軌跡的高重復性。該傳感器在復雜的裝配操作中尤為重要,機器人將遇到不同的問題(錯位、緊貼、力測試等),而對末端機械件施加力(機器人末端效應器)的精確運動控制至關重要。六軸力傳感器允許控制器識別機器人工具的正向,并提高最終效應器的靈巧性。為什么控制機器人的抓握力很重要?在某些應用中,還可能需要精確測量和控制機器人的抓握力,以確保易碎物體不會被抓手(即半導體晶圓處理)壓碎。為了解決這個問題,FUTEK設計并開發了納米傳感器。其 4 mm x 5 mm 的極小幾何形狀適合大多數最終效應器抓地力應用,同時又不犧牲標準負載單元的可靠性和精度。由于其輕質結構,它提供了高固有頻率響應,使其適合快速力變化應用。FUTEK 的納米傳感器是定制的,以適應獨特的 OEM 解決方案。
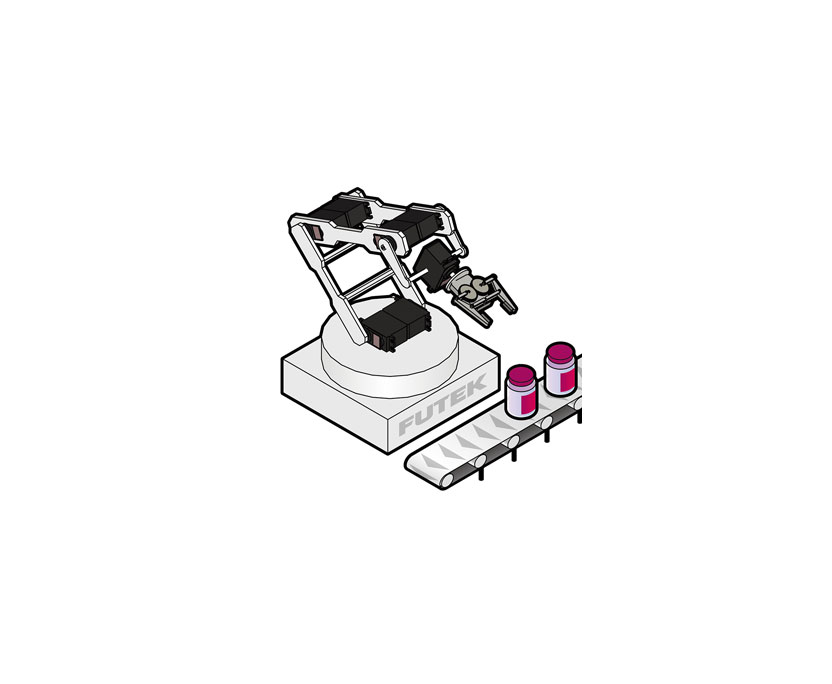
1、6 軸力傳感器安裝在其中一個機器人的手腕上(最終效應器前的最后一個接頭)。
2、6 軸力傳感器捕獲手臂運動過程中輸出的力和扭矩,然后由 USB 系列、IDA100 放大器或 QIA 多通道 SPI 數字輸出放大器對傳感器輸出信號進行調理、放大和數字化。
3、然后將信號發送到 PLC、 PC 或機械臂控制器,提供高精度力 /扭矩反饋。
4、此外,通過 IDA100,可以監控傳感器的放大輸出,并可通過 FUTEK 的 SENSIT ?軟件對模擬放大器設置進行數字化調整。
產品使用
重量輕、精度高的 QMA142 定制 6 軸力/扭矩傳感器,與以下信號調節器之一配對:
QIA125 - 3 通道低功耗 SPI 數字輸出放大器;QIA131 - 6 通道高分辨率 SPI 數字輸出放大器;USB 系列數據采集模塊;IAA 系列模擬輸出放大器。
| QMA142 六軸力傳感器 | 
| QLA414 納米力傳感器 |
|
|
|
|

| QIA131 高分辨率6通道SPI輸出 | 
| QIA125 數字低功耗三通道SPI輸出 |
|
|
|
|

| IDA100 數字放大器 |
|
|




 醫療與制藥
醫療與制藥
 機器人和系統集成商
機器人和系統集成商
 自動化
自動化
 汽車
汽車
 制造業
制造業
 材料和耐久性測試
材料和耐久性測試
 航天航空與國防
航天航空與國防
 農業
農業 電話
電話 郵箱
郵箱