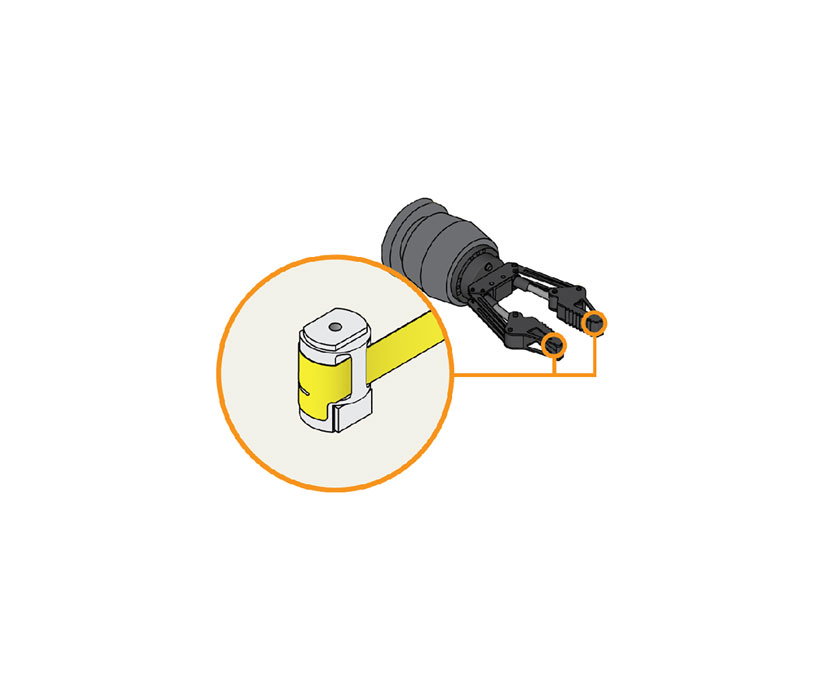
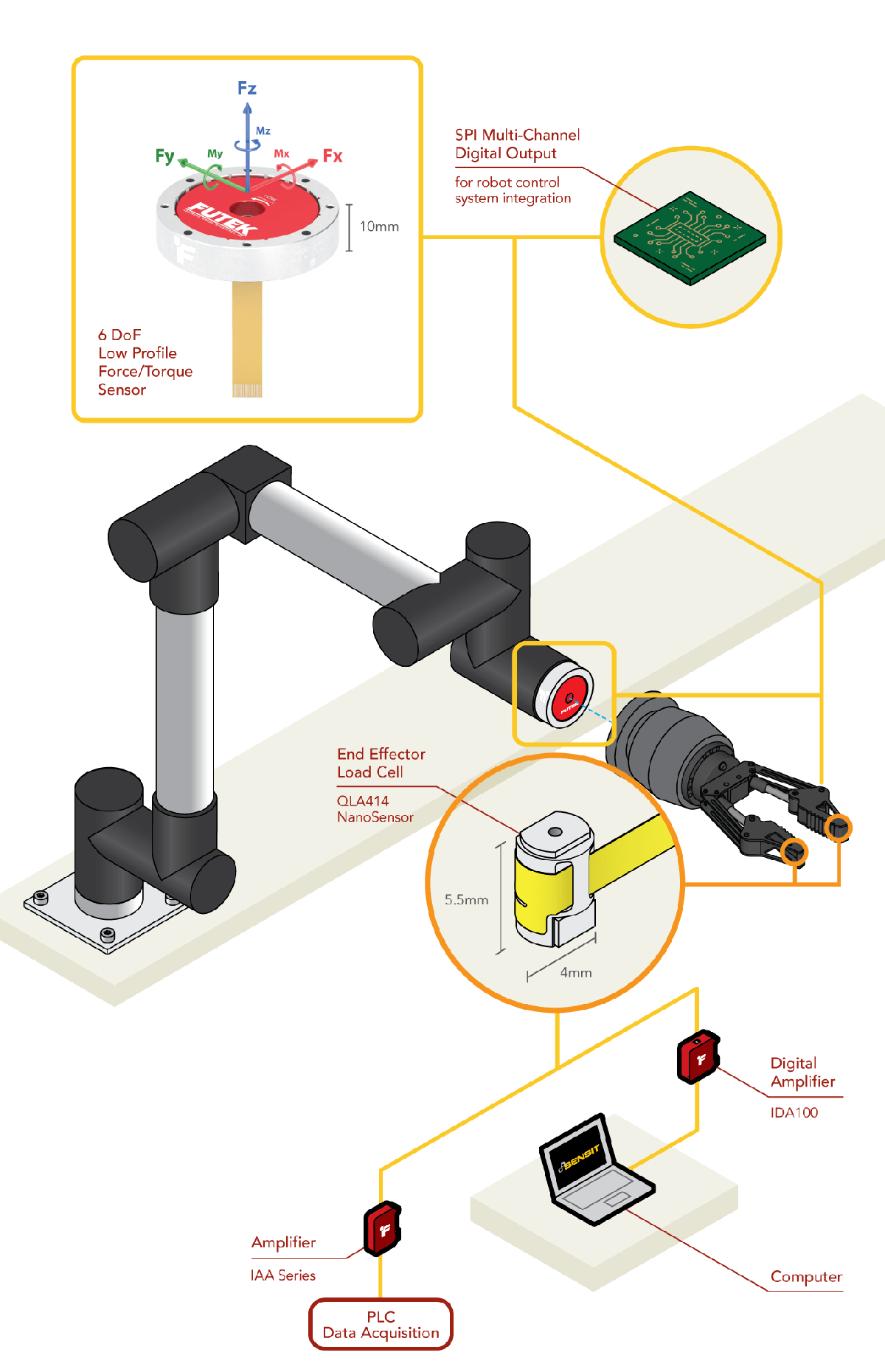
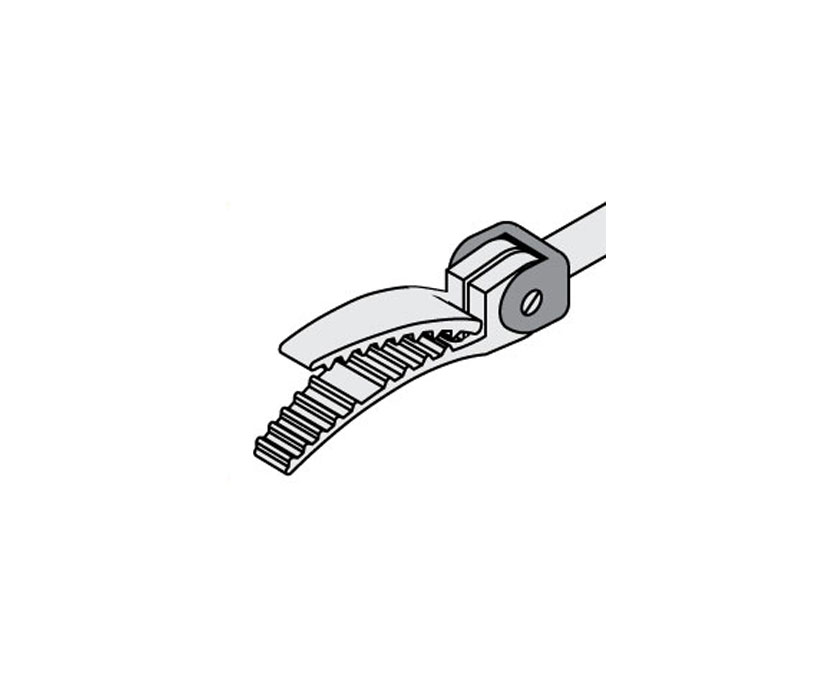
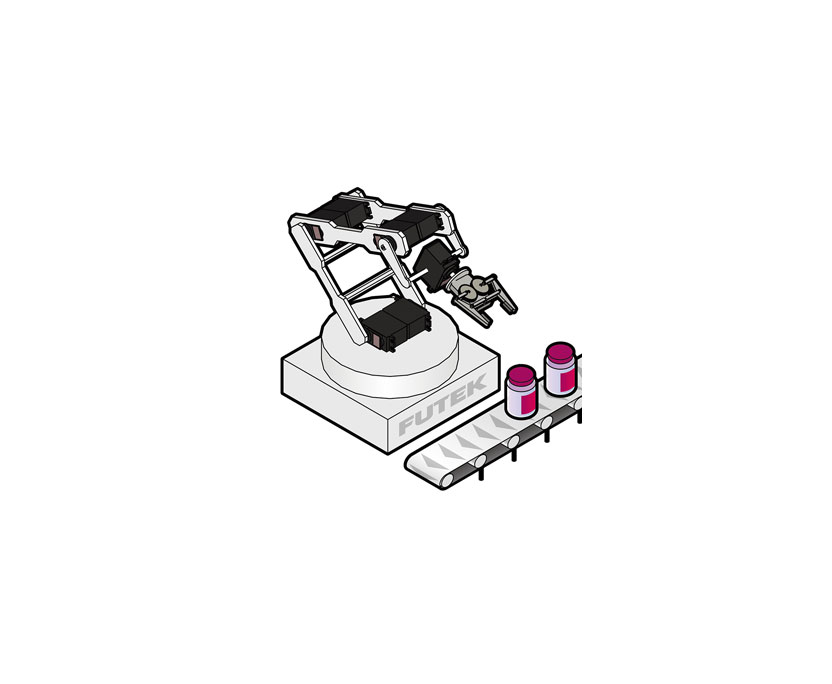
1、納米傳感器安裝在機器人端的抓手上, 它們可以完全定制,以適應獨特的 OEM 抓力的應用程序。
2、納米傳感器捕獲效應器產生的抓力,然后,傳感器輸出信號由 USB 系列數據采集模塊、IDA100 放大器或 QIA 多通道 SPI 數字輸出放大器進行調理、放大和數字化。
3、然后將對應的放大器信號發送到 PLC、 PC 或機械臂控制器,提供高精度的抓握力反饋系統。
4、此外,通過 IDA100,可以監控傳感器的放大輸出,并可通過 FUTEK 的 SENSIT ?軟件對模擬放大器進行數字化調整。
產品使用
4 毫米 x 5 毫米高精度納米傳感器 QLA414,與以下信號調理器之一配對:
QIA125 - 3 通道低功耗 SPI 數字輸出放大器;QIA131 - 6 通道高分辨率 SPI 數字輸出放大器;USB 系列 - 帶 USB 數字輸出的數據采集模塊;IAA 系列模擬輸出放大器。
| QLA414 納米力傳感器 |
| QMA142 六軸力傳感器 |
| IDA100 數字放大器 |
| QIA131 高分辨率6通道SPI輸出 |
| QIA125 數字低功耗三通道SPI輸出 |
| USB 系列 高分辨率數據采集模塊 |
| IAA 系列 應變放大器 |





 醫療與制藥
醫療與制藥
 機器人和系統集成商
機器人和系統集成商
 自動化
自動化
 汽車
汽車
 制造業
制造業
 材料和耐久性測試
材料和耐久性測試
 航天航空與國防
航天航空與國防
 農業
農業





 電話
電話 郵箱
郵箱